Шаг шестой
Когда дрон взлетит, придёт время вспомнить, для чего всё вообще затевалось. Чем больше денег и труда на него затратили(особенно, если удалось собрать собственный, уникальный аппарат), тем большую полезную нагрузку дрон сможет нести. Камера, домашнее животное, любой другой малогабаритный груз…
Атаковать крупную военную базу мелкими дронами чаще всего бессмысленно, даже если кустарные мастера наклепают целый рой. При качественной работе системы ПВО и РЭБ им ничего не светит.
Конечно, если единовременно наслать на базу десятки тысяч дронов, что-нибудь до цели обязательно долетит… Но не факт. Да и вряд ли такие развлечения доступны частному лицу.
Сделать дрон невидимым для РЭБ и для радаров практически невозможно. Как показала история применения дронов-шахидов в Ираке, Сирии и Афганистане, наиболее эффективно их использовать по открытой позиции.
Город — самое удачное место для использования дронов. От подобного рода атак пока лучше всего защищает отсутствие мотивации — это банально никому не нужно. А там, где дроностроители мотивированы на войну, всё несколько уравновешивается большим количеством людей с огнестрельным оружием.
Со временем для энтузиастов станут доступны более навороченные контроллеры полёта с функциями искусственного интеллекта. Примочки будут развиваться, и в какой-то момент можно ожидать появления на рынке ударных дронов многоразового использования, которые начнут сбрасывать самодельные взрывные устройства.
Военные определённо это понимают и проектируют многообразные виды анти-дронового оружия: от лазеров до мощных глушилок. Вырисовывается перспектива создания на коленке эрзаца военной авиации, ущерб от которой будет довольно неслабым. Так что подождём ещё немного, и война дронов затмит любуюВойну клонов».
Редакция WARHEAD.SU намеренно убрала из статьи часть данных о дронах и методах их использования. Наш материал не инструкция, а, скорее, предупреждение.
Сборка в несколько шагов
Первым действием является установка управляющей платы, ее размещение должно быть максимально близким к центру платформы из фанеры. Для прикручивания лучей к плате используются саморезы. Чтобы закрепить аккумулятор и посадочные лыжи – можно использовать алюминиевую липкую ленту.
Приемник сигнала устанавливается в непосредственной близости к плате. Для этого вполне подойдет качественный суперклей. Соединение с платой происходит за счет 2-х трехжильных шлейфов, но только когда приемочный канал выполняет те же функции, что и канала на управляющей плате.
Для подключения платы управления нужно ознакомиться с инструкцией.
Следующим этапом является установка двигателей. Необходимо учитывать, что расстояние между краями платформы и осью вращения должно быть эквивалентно друг другу. Также необходимо предусмотреть отверстие для валового хвоста. Подготавливая отверстия, следует просверлить их насквозь на весь квадрат. Это нужно чтобы оценить будет ли вал цепляться за края.
Еще одним этапом сборки становится подключение проводки питания. Для этого процесса используются переходники или клеммы, из которых составляется параллельное соединение 4-х проводов. Также потребуется установка разъемного соединения в месте подключения к проводам батареи питания устройства. Во всех остальных местах производится спаивание для надежности.
Чтобы избежать поломки конструкции во время полета за счет вибрации, порыва ветра, резкой смены направления и т.д. все детали закрепляются при помощи термоусадки, хомутов, саморезов. После этого можно подключать провода драйвера к управляющей плате, и запускать режим тестирования для выявления проблем.
Алгоритм сборки
Сборка квадрокоптера не представляет большой сложности.
- Делается рама, сборкой готового комплекта или создания конструкции из подручных материалов.
- На центральную пластину рамы крепится электроника управления. Это плата, регулирующая обороты двигателей и обрабатывающая сигналы с пульта.
- К плате управления присоединяется приемник радиосигнала. Его можно закрепить на раме термоклеем.
- Строго на равных расстояниях от центра рамы до оси привода, на ногах сверлятся отверстия для крепления двигателей.
- Прокладываются провода, силовая сеть управления двигателями. Если покупался комплект оборудования, в нем есть все нужные проводники и инструкция. В случае, когда работа делается своими руками, стоит помнить: проводка соединяется в соответствии с типом управляющей платы, схема подачи питания параллельная.

Завершается сборка тщательным изолированием мест соединения проводов термоусадкой. При необходимости защиты плат управления от влаги, они накрываются кожухами. После этого можно присоединять аккумулятор и тестировать коптер в работе.


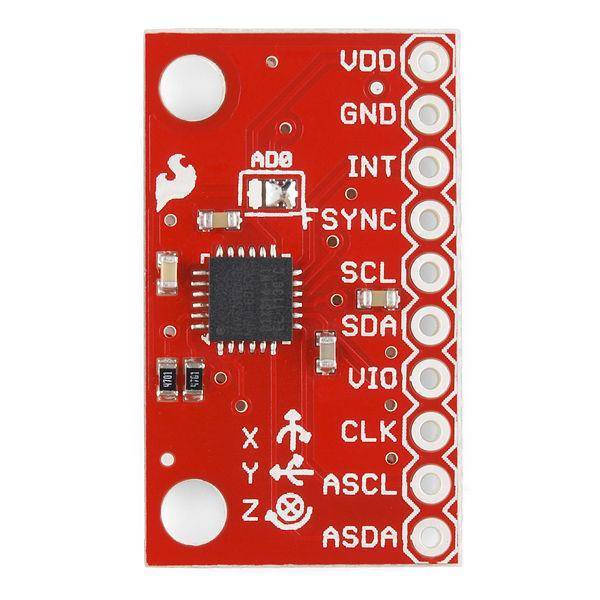
Настройка акселерометра-гироскопа (I2C)
TL;DR:
1. Не подключайте к 5 В!
Что такое I2C?
На простых платах акселерометра все логично и понятно: на ней предусмотрены отдельные аналоговые выходы для осей X, Y и Z. Каждый выход соответствует отдельной оси акселерометра. Если вы теперь взглянете на плату с I2C, поймете, что тут все несколько запутаннее. I2C – это стандарт обмена данными, при котором большие объемы информации передаются с помощью цифровых логических импульсов вместо аналоговых выходов. MPU6050 предоставляет вам 6 контролируемых осей (3 для гироскопа и 3 для акселерометра). Если бы они все были аналоговыми, нам пришлось бы задействовать все аналоговые порты на Arduino Uno. С протоколом I2C мы задействует гораздо меньше контактов для подключения.
Шаг 9: Подключаем моторы
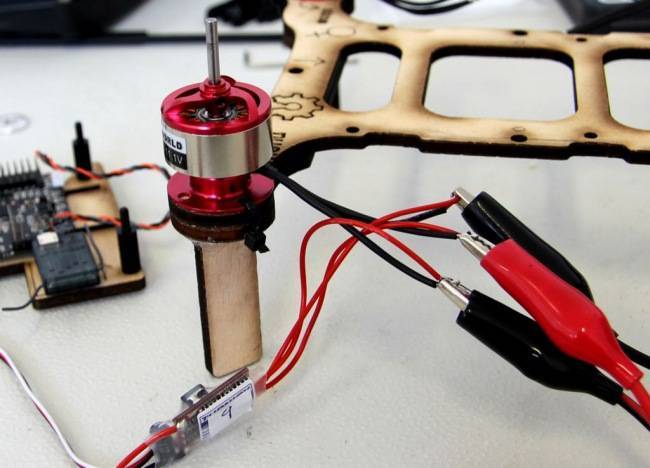
Подключаем каждый мотор к его контроллеру скорости, однако перед тем как все окончательно спаять, нужно определиться с тем, какой провод контроллера с каким проводом мотора соединить так, чтобы мотор вертелся в нужном нам направлении. Для этого подключите 3 моторных кабеля к контроллеру скорости в произвольном порядке, затем контроллер скорости к полетному контроллеру через 3 контактный разъем, подключите к полетному контроллеру батарею. Включите радиоприемник, запустите мотор и проверьте в корректном ли направлении он вращается. Повторите это с оставшимися тремя моторами, а когда проверка окончена, кабели можно спаять.
Алгоритм сборки
Сборка квадрокоптера не представляет особой сложности.
- Скелет создается путем сборки готового набора или создания конструкции из подручных материалов.
- Электроника управления установлена на центральной пластине рамы. Это плата, которая регулирует обороты двигателя и обрабатывает сигналы от пульта дистанционного управления.
- Радиоприемник прикреплен к плате управления. Его можно закрепить на раме с помощью клея-расплава.
- На равных расстояниях от центра рамы до оси привода в ножках просверлены отверстия для крепления двигателей.
- Проложите кабели, сети для управления двигателями. Если вы приобрели комплект оборудования, в него входят все необходимые провода и инструкции. Если работа выполняется своими руками, стоит помнить: проводка подключается в соответствии с типом платы управления, силовая цепь параллельная.

Завершаем сборку, тщательно изолируя места соединений термоусадочной пленкой. Если необходимо защитить платы управления от влаги, их закрывают. Затем можно подключить аккумулятор и проверить коптер в работе.


Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Совет! Рекомендуется приобретать комплект из пульта и приемника. Они полностью синхронизированы между собой и не требуют сложной настройки.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона по сути ничем не отличается от конструирования обычного квадрокоптера
Разница состоит в подходе к выбору деталей — нужно уделить особое внимание моторам, раме и винтам
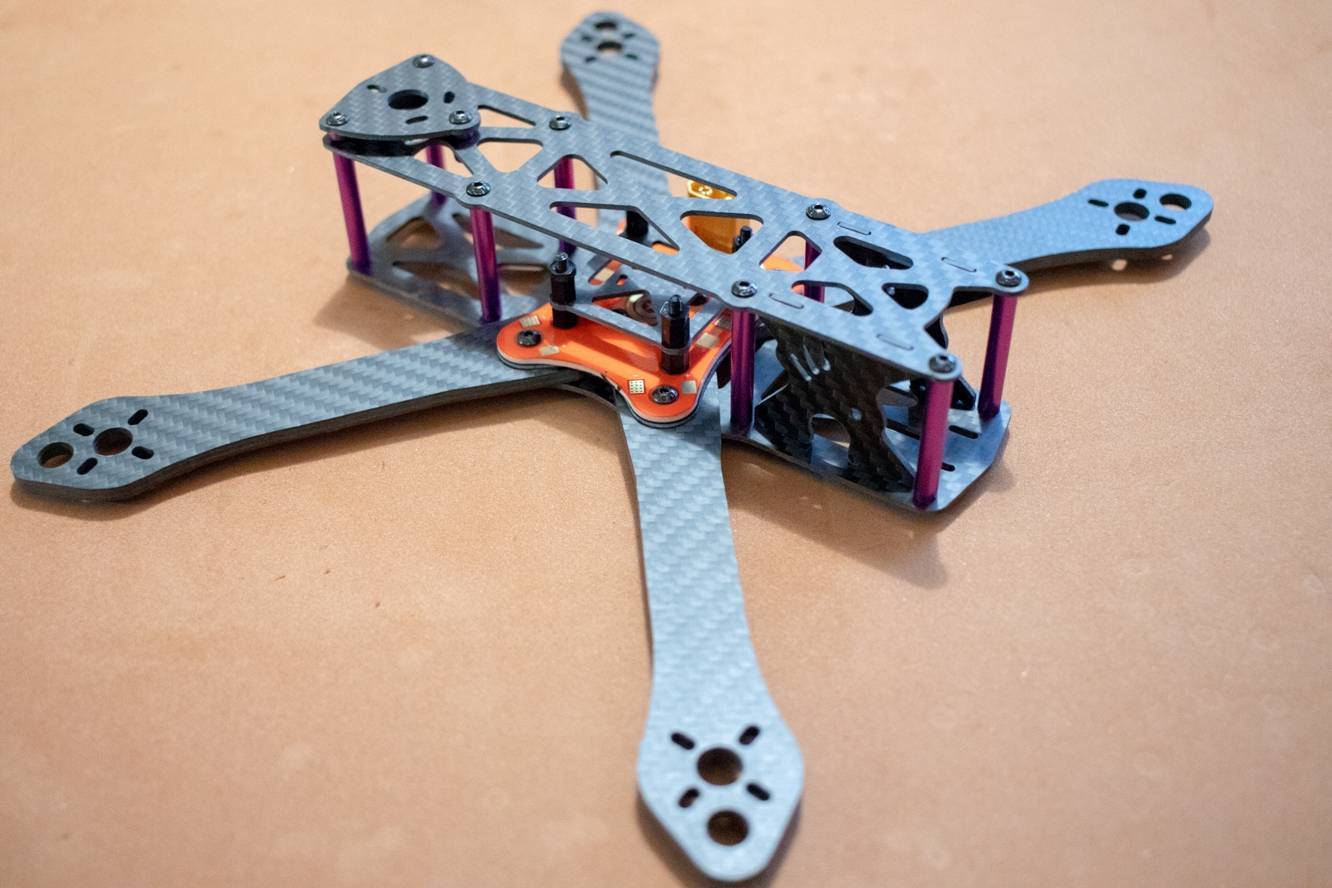
В случае с гоночным дроном основу лучше приобретать готовую. Она обеспечит оптимальную балансировку аппарата. Хорошим вариантом для сборки станет легкая и прочная рама из карбона со стандартными четырьмя лучами.








Сборка моторной части
Моторы для гоночного коптера закрепляют на лучах рамы винтами в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подойдут 2205-2600 KV. В центральной части лучей устанавливают регуляторы оборотов и соединяют проводами с моторами. Винты для сборки гоночного дрона можно выбирать с двумя или тремя лопастями — первые дадут большую скорость, вторые облегчат процесс маневрирования.
Регулировка оборотов гоночному коптеру нужна обязательно, иначе он не сможет маневрировать
Установка электронной части
Стандартным способом на центральной пластине рамы закрепляют плату управления. Ее можно посадить на горячий клей или просверлить отверстия и зафиксировать небольшими винтами. В последнем случае конструкция после сборки получится надежнее. К раме прикрепляют приемник сигнала, который будет передавать команды на плату управления. Аккумулятор традиционно монтируют в нижней части устройства отдельно от микрочипа.
Камеру в гоночном дроне фиксируют в специальном гнезде на готовой раме
Подсоединение проводов
На финальном этапе сборки остается подключить к плате управления провода, отходящие от камеры и моторов. Сам микрочип при этом соединяют с аккумулятором.
При прокладке проводов нужно следить, чтобы они оставались подальше от лопастей дрона
Сборка из подручных материалов
Как ни прискорбно, но все же собрать полностью из подручных материалов полноценный квадрокоптер не получится. В любом случае придется закупать комплект из деталей. Но их можно покупать и не целым комплектом, а взять лишь самые необходимые. К ним относятся моторы, винты, управляющая плата с приемником и аккумулятор.
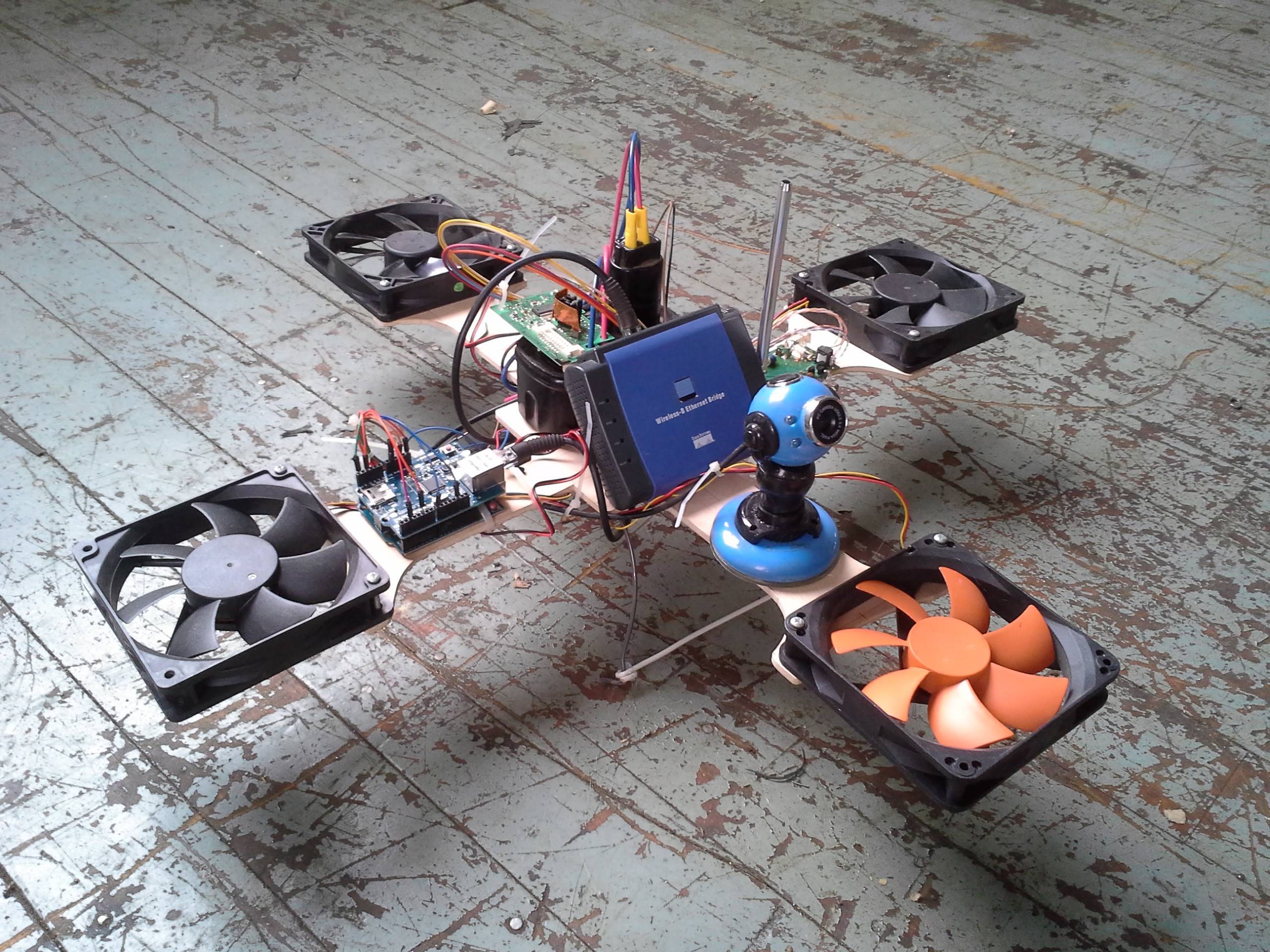
Это все что необходимо для того чтобы просто поднять квадрокоптер в воздух и управлять им с помощью аппаратуры. Для того чтобы в воздухе этот набор комплектующих элементов не развалился на куски, требуется закрепить их на прочном, но легком корпусе. Сделать его можно из подручных материалов. В ход может пойти все что угодно, начиная от палочек для мороженого до пластиковых крышек и бутылок.
Что касается дополнительных покупок, то понадобится также приобрести аппаратуру, поскольку без нее управлять собранным устройством будет чрезвычайно сложно. Схему квадрокоптера можно найти в сети, либо придумать самостоятельно. При создании корпуса, стоит помнить о полетных качествах, равновесии, устойчивости и легкости конструкции.
В противном случае устройство может превратиться не в БПЛА, а в ползающий мини вентилятор с дистанционным управлением. Дорабатывать созданную конструкцию можно будет бесконечно, поэтому при первой сборке можно особо не стараться, чтобы в процессе работы не потерять интерес.
Чтобы техническая часть была максимально сбалансированной без применения сложных расчетов, можно воспользоваться небольшой хитростью. Можно выбрать конкретную распространенную модель и заказать под нее комплектующие материалы из базового списка
При заказе важно правильно указать детали. Так, в списке заказа должны присутствовать по 2 мотора правого вращения, и левого вращения
В пару к ним должны быть соответствующие винты – правосторонние и левосторонние. В противном случае устройство не будет функционировать. Всегда существует вероятность того, что при сборке деталей могут попасться бракованные заготовки, поэтому некоторые можно заказать даже в двойном экземпляре на случай замены. В отличие от заводских kit-наборов, описанных выше, из обычных деталей голыми руками и отверткой собрать такое устройство не получится. Придется поработать с паяльником, клеевым пистолетом, изолентой и двусторонним скотчем.
Только таким способом удастся получить желанный квадрокоптер. После того, как будет получена рабочая модель, ее можно будет модернизировать по своему усмотрению. Добавить антенны, светодиоды, биперы (пищалки) и прочие детали, увеличивающие функциональность домашнего кварокоптера.
Наладка
- Производим запуск двигателей. Активация двигателей нуждается в выполнении процесса запуска моторов — арминга. Руководство к эксплуатации подробно рассказывает каким образом этого добиться. Деактивация двигателей требует проведения процедуры дизарминга.
- Включаем слабый газ и убеждаемся, что моторы вращаются. Характер вращения должен быть таким же, как указано на схеме в руководстве к контроллеру. При неправильном вращении двигателя нужно просто поменять местами полюса проводов, идущих от двигателя к контроллеру.
- Привинчиваем вторую платформу к корпусу квадрокоптера.
- Подсоединяем к корпусу ленту с липучкой для крепления аккумулятора.
Георгий Ботезат и первый полет.
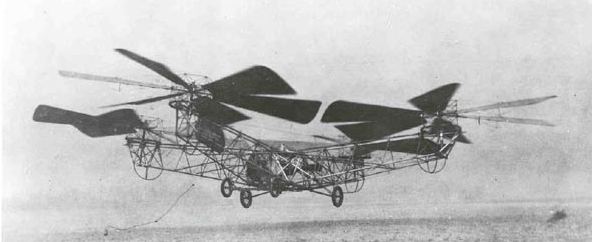
Один из родоначальников такого вертолета, был аппарат Ботезата, взлетевший в воздух еще в 1922 г. Георгий Александрович Ботезат – американец с корнями из России, он был инженером электромонтажных работ, изобретателем и профессором Петроградского технологического института. В одном из экспериментальных полетов аппарат Ботезата смог поднять в воздух груз весом 450 кг на высоту 4 метра.
Предпосылки появления современных коптеров начались на заре вертолетостроения – в 1920-х г. В те дни над одной и той же идеей думали двое, каждый сам по себе: это были Этьен Эмишен, французский инженер и Ботезат. Удивительно, но они оба почти одновременно сконструировали четырехвинтный вертолет, где все разнесенные винты приводились в движение единым двигателем с помощью трансмиссионной системы. Для обеих моделей проводились испытательные полеты, в результате которых аппараты поднялись в воздух на высоту от 5 до 15 метров и пролетели около 1 километра. Но на этапе тестирования, дело застопорилось. Причиной этому стало:
• выходящая из строя и не особо надежная система трансмиссии, которая передавала крутящий момент с двигателя на роторы
• в аппарате Эмишена использовалось восемь пропеллеров, в то время как модель Ботезата могла двигаться исключительно благодаря попутному ветру.
Обе модели не имели баланса в пространстве при полете, особенно при сильном ветре из-за отсутствия системы воздушной стабилизации. И несмотря на то что по дате изобретения первый квадрокоптер в мире был рук Этьена Эмишена, его модель не считается уверенным прообразом современного коптера.
В 1922 г было положено начало испытаниям одного из первых четырехвинтных дронов. Такая система с большим количеством винтов упрощала управление: для того, чтобы повернуть аппарат, нужно было лишь изменить положение носовой его части. И кто бы мог подумать, в конструкции лопастей использовались растяжки… рояльных струн.
Только в 50-ых несколько производителей сконструировали аналогичные квадролеты в качестве опытных образцов. Но наиболее полноценный вариант летательного устройства разработал все же Ботезат, это был квадрокоптер, управляемый несущими винтами.
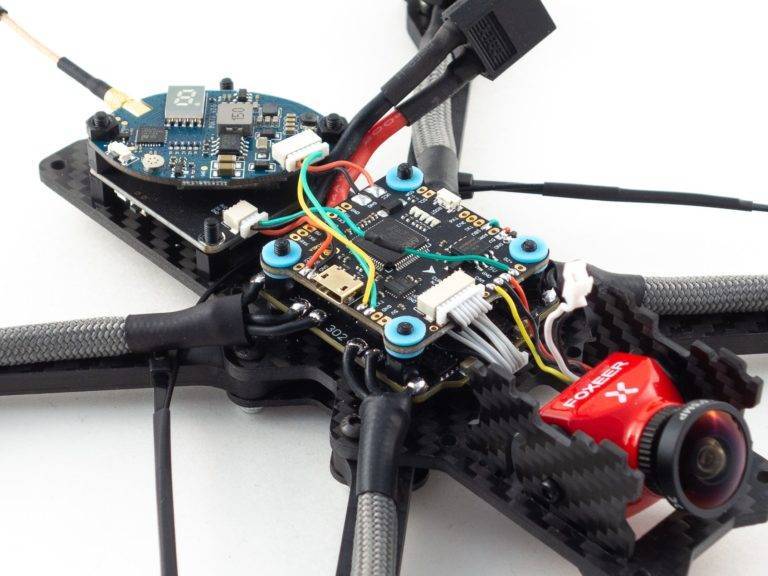
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
инструкиция подключения квадрокоптера eng
инструкция подключения квадрокоптера rus
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Настроить и “обучить” квадрокоптер с помощью ПО
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
Особенности процесса сборки
Для того чтобы собранный в домашних условиях квадрокоптер долгое время радовал владельца, важно обратить внимание на элементы, влияющие на функционал прибора. Квадрокоптер состоит из нижеперечисленных обязательных элементов:
Квадрокоптер состоит из нижеперечисленных обязательных элементов:
Квадрокоптер состоит из нижеперечисленных обязательных элементов:
Рама
рама Стоимость детали варьируется от 1 500 до 15 000 рублей. Выбор напрямую зависит от предназначения устройства. Производители предлагают несколько вариантов: три-, квадро-, гекса-, октокоптерные рамы. При длительной эксплуатации рекомендуется выбирать гексакоптер, гарантирующий стабильную работу устройства при поломке двигателя. Для беспилотников с большой массой следует приобрести октокоптер. Квадрокоптерная рама самая популярная среди вышеперечисленных, что обусловлено доступной стоимостью детали. Именно квадрокоптер мы и рассматриваем в нашем примере.
Двигатель
мотор квадрокоптера лучше выбирать безколлекторный Цена в разных магазинах достигает 7 500 рублей и напрямую зависит от уровня качества. Число двигателей выбирается в соответствии с типом квадрокоптера: варьируется от 3 до 8 штук. Рекомендуется выбирать безколлекторные двигатели, главными преимуществами которых является длительность эксплуатационного периода, стойкость к внешним фактором.







Давайте посмотрим, как можно собрать дрон из простых материалов, например из бытовых сантехнических труб:
ESC
ESC ESC – Electronic Speed Controller или регулятор скорости вращения двигателей. Обязательная деталь стоимостью примерно 3 700 рублей. Число ESC точно совпадает с количеством установленных моторов. Как правило, производители предлагают приобрести сразу комплект деталей.
Полётный контроллер
Деталь отвечает за процесс управление квадрокоптером и во время запуска, и во время полета. Цена устройства может меняться в зависимости от качества и технических особенностей.
Передатчик и приемник
схема радиопередатчик – приемник – полетный контроллер Деталь необходима обмена оперативной информацией
Особенно важно для большей функциональности и производительности коптера. Стоимость меняется в разные стороны в зависимости от качества детали. Выбор модели передатчика зависит от того, для каких целей будет использовать дрон
Выбор модели передатчика зависит от того, для каких целей будет использовать дрон.
Пропеллеры
Количество пропеллеров зависит от типа беспилотника. Этим следует руководствоваться, выбирая конкретную модель
Важно обратить внимание и на длину лопастей: меньшие отлично подойдут для быстрого набора или снижения скорости, большие же продлят полет дрона и обеспечат стабильность его нахождения в воздухе. Стоимость зависит от материала, из которого изготовлены лопасти. Пропеллер – достаточно хрупкая деталь, рекомендуется приобрести сразу несколько дополнительных
Пропеллер – достаточно хрупкая деталь, рекомендуется приобрести сразу несколько дополнительных
Пропеллер – достаточно хрупкая деталь, рекомендуется приобрести сразу несколько дополнительных.
Защита пропеллера
пропеллеры с зашитой Важный аксессуар, являющийся гарантом безопасности и долговечности прибора. Установка защиты позволит предотвратить застревание квадрокоптера и снизит вероятность поломки в процессе эксплуатации.
Чертежи и схемы квадрокоптеров
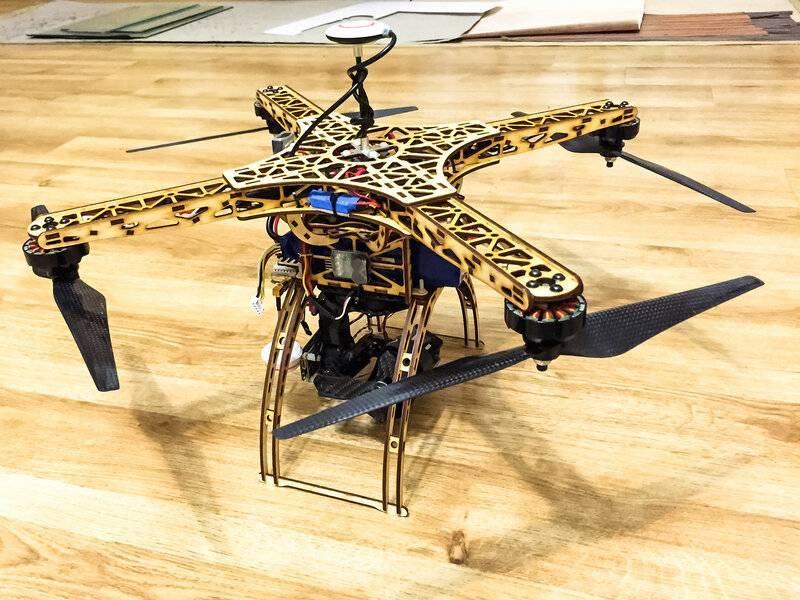
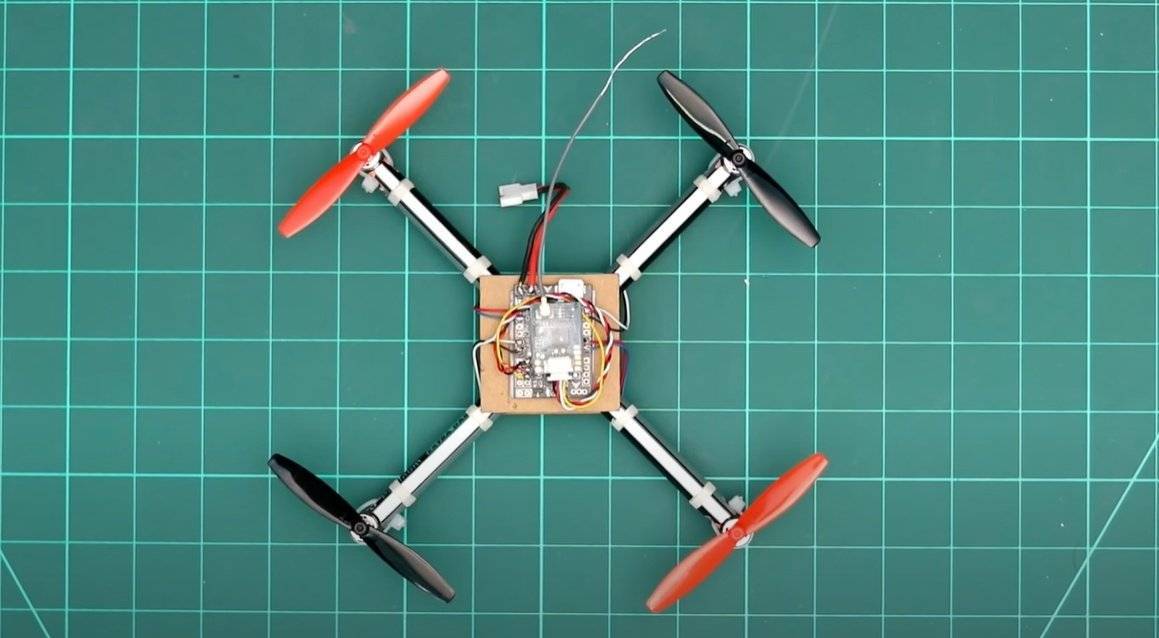
Чертежи для сборки квадрокоптера могут незначительно различаться между собой. Детали зависят от габаритов собираемого своими руками дрона, от его формы и конструктивных особенностей. Но базовый чертеж обычно предлагает сделать маленький квадрокоптер на крестообразной силовой раме с размерами 363 на 363 см. Параметры корпуса при этом составляют около 107 на 107 см, в таком случае в дроне без проблем размещаются основные детали.
Стандартно самодельные дроны собирают на рамах из четырех лучей
Структурная схема квадрокоптера выглядит очень просто. В центре конструкции на силовой раме всегда располагается электронная плата управления. По четырем углам на равном расстоянии друг от друга нужно поставить двигатели с закрепленными на них пропеллерами. В корпус в центре конструкции монтируют также элементы питания и радиодатчики для удаленного пилотирования.
Регуляторы оборотов на лучах необходимы для дронов, предназначенных для маневрирования
Важно! При сборке дрона своими руками нужно следить за тем, чтобы основная масса конструкции приходилась на центр и не смещалась в ту или иную сторону
Сборка
Как и в первом случае, она начинается с изготовления рамы, для которой взять можно пластиковые трубы. Поскольку вес их небольшой, квадрокоптер будет мобильным, а развиваемая им скорость высокой. К тому же, такой каркас легко починить в случае «аварии».
Силиконовые провода помогут подсоединить двигатели к каждому пропеллеру. Аккумулятор с электроникой неплохо закрепить на платформе, установленной в центре рамы. Прежде, чем приступить к монтажу электронной начинки, следует скачать схему подключения, найти которую несложно на форумах. Если нужно, ДУ можно перепрошить с учетом последних обновлений. Там же, на форумах, рассказывают, как перепрошить пульт.
Собрать квадрокоптер своими руками по силам не каждому, поскольку он требует инженерных навыков. Но, если имеется инструкция и схема, процесс по созданию летающего девайся упрощается.
Электронные регуляторы скорости (Electronic Speed Controllers / ESC)
Электронный регулятор скорости (ESC) (другие названия: электронный регулятор скорости, электронный регулятор хода) представляет собой электрическую цепь, которая призвана контролировать скоростной режим беспилотника (впрочем, и других типов летательных аппаратов, так как это устройство в различных модификациях есть и у самолетов)
По сути, это важное устройство передает энергию от батареи к двигателю бесколлекторного типа, преобразуя постоянный ток источника питания в переменный ток, который нужен мотору
Схема работы электронного регулятора хода предполагает подачу (на входе) напряжения с батареи и поступление сигналов с полетного контроллера (бортового компьютера дрона). А вот на выходе от регулятора поступает на привод управляющее напряжение. Отсюда понятно, что регуляторы хода должны быть совместимы с полетным контроллером, когда проектируется и собирается конкретная модель беспилотника. Кроме того, они должны потреблять тока меньше, чем отдавать. Расчет же тока для привода производится, исходя из характеристик мотора и пропеллера плюс 20-30%.
О регуляторах можно рассказывать долго, а их важность для беспилотников бесспорна. Об этом говорит тот простой факт, что современные дроны полностью зависят от этого вида устройств для нормального полета и выполнения всех задач, которые ставятся перед конкретным видом летательного аппарата
Поэтому DJI и другие производители дронов на электрической тяге много работают над совершенствованием электронных регуляторов хода. При выходе каждой новой модели беспилотника DJI старается внести усовершенствования и в ESC, о чем обязательно информирует будущего потребителя, например, о снижении энергопотребления и более высокой производительности.
 Специальные регуляторы скорости для гоночных дронов DJI Takyon Z14120
Специальные регуляторы скорости для гоночных дронов DJI Takyon Z14120
Где же устанавливаются электронные регуляторы ходы? Как правило, эти устройства располагают в раме летательного аппарата. У дронов DJI они, как правило, располагаются в “руках” ближе к двигателям. Многие современные модели беспилотников оснащаются достаточно продвинутыми ESC, которые могут работать в различных режимах. А это невозможно без качественного программного обеспечения (прошивки). Прошивка должна регулярно обновляться для исправления ошибок в кодах управления, а также для повышения эффективности работы устройства (снижения потребления тока и т.п.). Если вы приобретаете одну из моделей коптера бренда DJI, то вам не придется принудительно обновлять ПО, потому что при выходе новой версии прошивки, все происходит в автоматическом режиме. Поэтому вам лично не придется вносить какие-либо изменения в работу ESC.
Серийное производство квадрокоптеров в KLONA
Любительское моделирование подходит в качестве хобби, но если у вас есть идея и работающий прототип квадрокоптера, мы поможем наладить серийное производство дронов. Этапы налаживания производства в КЛОНА состоят из таких шагов:
Создание 3D-модели. Если у вас уже есть наработки, мы используем их, если они отсутствуют, то мы возьмем вашу идею и приступим к реализации.
После всех этапов разработки модели, мы утвердим ее и напечатаем. Полученный прототип корпуса потребуется доработать.
Тестирование. Потребуется понять, способен ли квадрокоптер выполнять все задуманное, хорошо ли работают механизмы, что отвечают за полет, не перегревается ли аккумулятор.
Правки, изготовление нового корпуса и пресс-формы.
Печать нескольких корпусов и проверка работоспособности пресс-формы.
Запуск серийного производства.
На каждом этапе могут требоваться доработки, поэтому мы перестраховываемся и тестируем модель, а не делаем пресс-форму с первого прототипа.






7 (499) 112 08 50
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Совет! Рекомендуется приобретать комплект из пульта и приемника. Они полностью синхронизированы между собой и не требуют сложной настройки.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Как собрать квадрокоптер 250 класса своими руками
Для начала придется не только приобрести необходимые компоненты, но и еще кое-что сделать собственными руками. Из подручных материалов можно сделать дешевый, но вполне себе надежный каркас для будущего коптера.
Лучше всего подойдет небольшой кусок ДВП. Из него будет проще выпиливать необходимого размера куски прямоугольной формы. Сделанные рамки и стойки из этого материала достаточно будет склеить обычным термоклеем.
В качестве контактов подойдут обычные швейные иглы, к основаниям которых следует припаять электрические провода. Вы также не сможете обойтись без программатора USB asp с SPI интерфейсом.
Следующим шагом является прошивка самого контроллера. На рисунке ниже вы можете увидеть распиновку контроллера. Прежде всего нужно поставить щупы на контакты контроллера согласно схеме распиновки и подключить их к программатору. Подключаем программатор к компьютеру. Скачиваем и устанавливаем драйвер. После установки драйвера необходимо скачать и установить сам прошивальщик с сайта lazyzero(.)de.
Теперь установите регуляторы на самой раме. За основу можно взять раму zmr 250, которая сделана из стеклопластика. Чтобы установить мотор на луч, необходимо воспользоваться пластиковым ремешком с застежкой. Его нужно просунуть в нижние отверстия двигателя и протянуть сквозь ушки луча. Затем закрепите ремешок при помощи фиксаторов на них.
Главной причиной, по которой выбор остановить лучше на этих пластиковых стяжках, является недостаточная длина винтиков, идущих в комплекте с рамой. Благодаря такой стяжке, двигатели будут установлены и закреплены надежно.
Теперь следует припаять и подключить приемник, запитать, откалибровать газ и проверить направление вращения мотора. Чтобы изменить направление, достаточно лишь перепаять любые два устройства. Если проверка прошла успешно, затяните регуль в термоусадку и плотно закрепите его. В итоге у вас должно получиться 2 мотора, вращающихся по часовой стрелке (CW) и два мотора, крутящихся против часовой стрелки (CCW), с учетом резьбы по валу.
Чтобы улучшить внешний вид, рекомендуется использовать гибкую, защитную оплетку из полиэстра. Чтобы соединить все моторы в один центр, потребуется небольшая платформа. Ее можно отпилить от стеклотекстолита. Таким образом у нас получится основа для платы питания регуляторов. Верхнюю половину по горизонтали можно отметить знаком «плюс», а нижнюю — «минусом».
Теперь провода от регуляторов залуживаем и припаиваем к этой плате. К платформе припаяйте разъем ХТ60
Тут следует обратить внимание на то, что кабель питания был припаян раньше, чем он попал в оплетку. В конечном итоге, подключив аккумулятор вы получите вращающиеся двигатели