Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
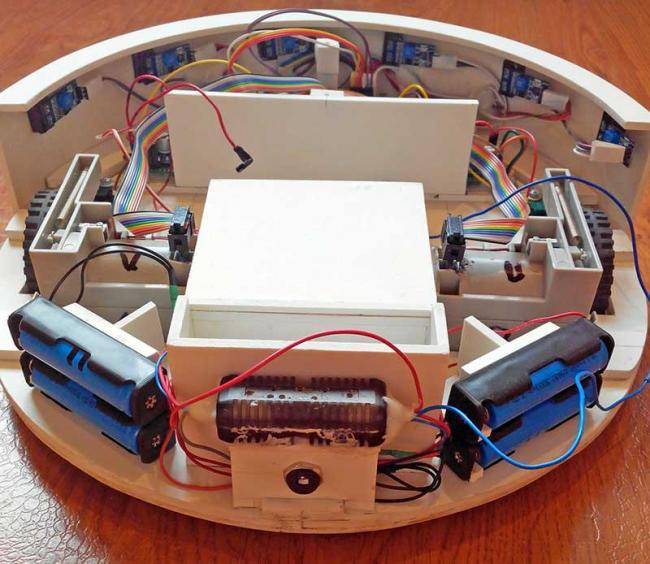
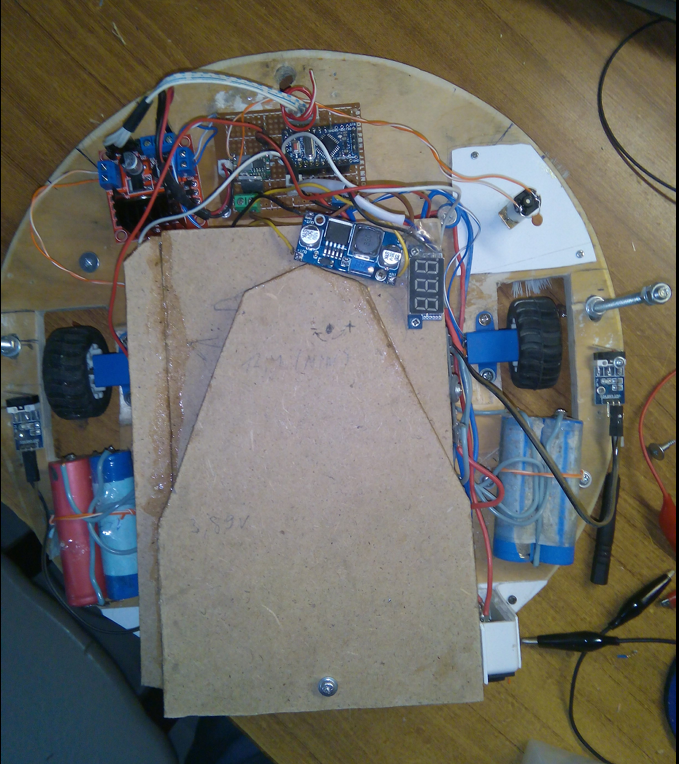
Блок питания представлен 4 аккумуляторами по 18V
Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры
Поэтому батареи должны быть изолированы от других материалов.
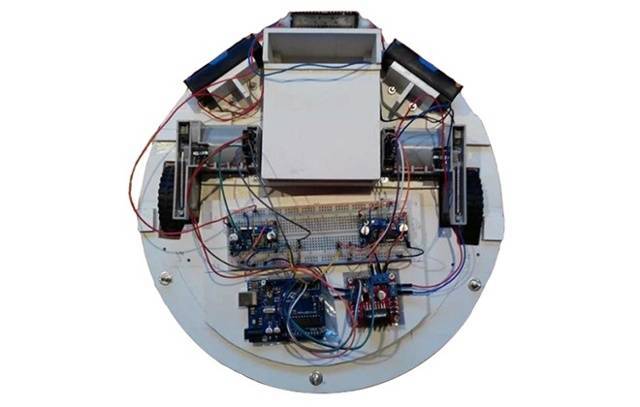
4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
Клей, саморезы и другие крепежные элементы.
Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.
Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Особенности изготовления робота-пылесоса дома
Для изготовления вам нужны хотя бы любительские навыки, потому что процесс производства робота-пылесоса требует затрат времени и терпения. Но готовый прибор поможет вам сэкономить сначала деньги, а потом время и силы, затрачиваемые на уборку.
Теоретические аспекты
Чтобы успешно изготовить робот-пылесос своими руками, необходимо понимать суть его работы изнутри. Давайте рассмотрим несколько правил, соблюдение которых обеспечит правильное функционирование техники:
- Робот должен иметь форму шайбы, диска для правильного хода движения;
- Колесики размещаются по диаметру пылесоса, чтобы он мог осуществлять развороты;
- Центр тяжести наиболее оптимален на колёсах, но может находиться и рядом с ними;
- Средняя скорость аппарата 25–35 см/сек;
- Контактный бампер размером минимум 0,5 от окружности — обязательная составляющая робота-пылесоса;
- Зарядка самодельного роботы должны выполняться от зарядного устройства, нет необходимости в разборке аппарата;
- Пыль и мусор должна собираться в отдельную ёмкость, которую можно вынуть и прочистить.
Как сделать чертёж
Современные интернет-ресурсы позволяют провести сборку робота-пылесоса без чертежей и иных схем. Однако для понимания вами строения аппарата, советуем такой чертёж составить, чтобы наглядно представить внутреннее устройство. Дело в том, что подобрать детали для робота проще, чем грамотно расположить их внутри. Представим вам примерный чертёж будущего чуда техники:
Совет! отметьте на чертеже все составляющего будущего пылесоса и их примерными габаритами. Стрелками укажите направления воздуха и засасывания частиц пыли. Наглядность — один из шагов к успеху будущей сборки.
Для составления схемы давайте определимся, какие составляющие понадобятся в работе:
- Плата Arduino — «головной мозг» будущего робота;
- Турбина от старого пылесоса;
- Двигатель маленького размера (можно взять старый компьютерный кулер);
- Дальномеры — 2 штуки;
- Колёса (желательно 2 обычных и 1 поворотное), двигатели с редукторами;
- Контроллер (для двигателя);
- 3 литиевых аккумулятора;
- Контроллер заряда;
- Провода;
- Плотный картон.
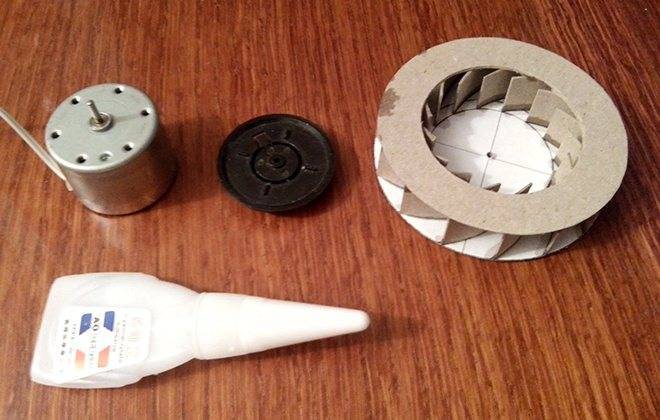
Важно! Если не сможете найти старую турбину — её можно сделать самому из плотного картона. Схема прилагается
Особенности проведения сборки
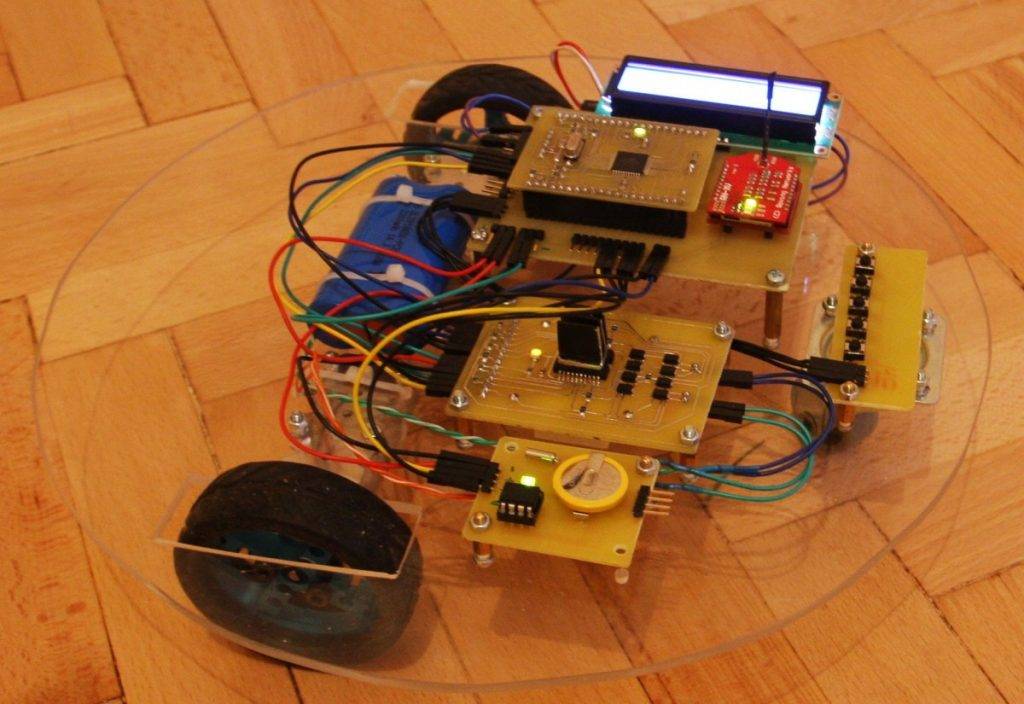
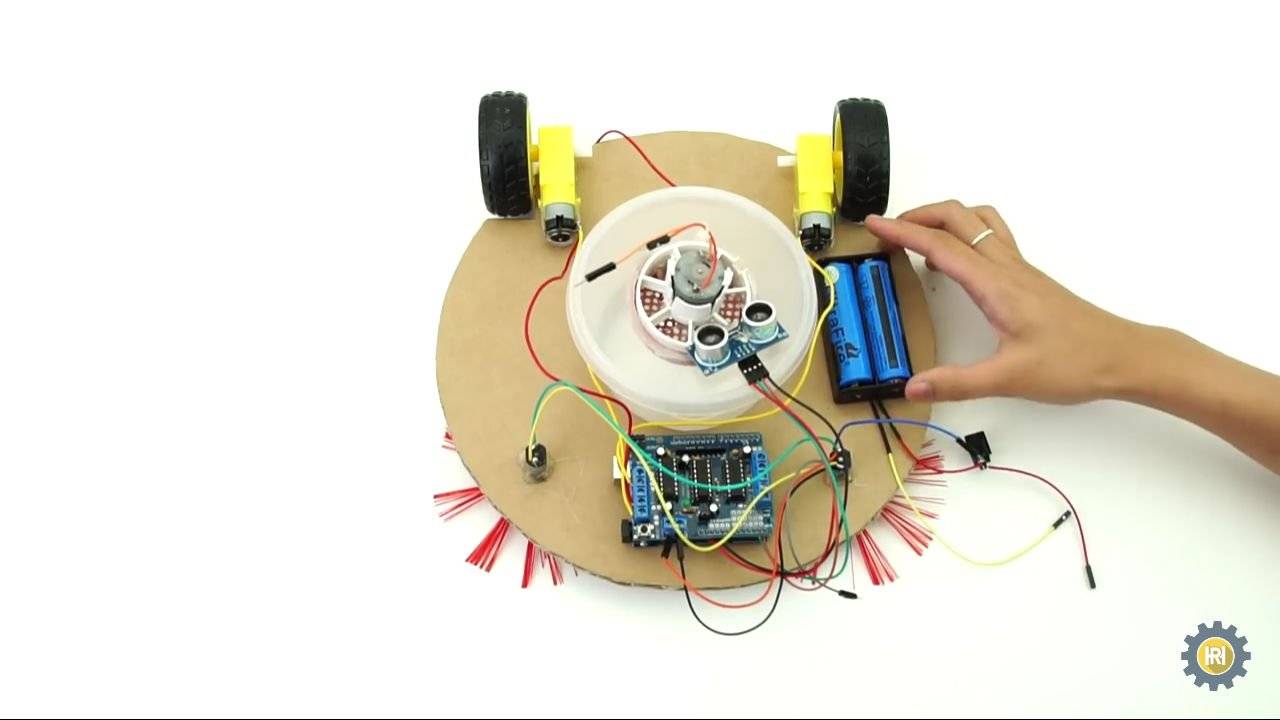
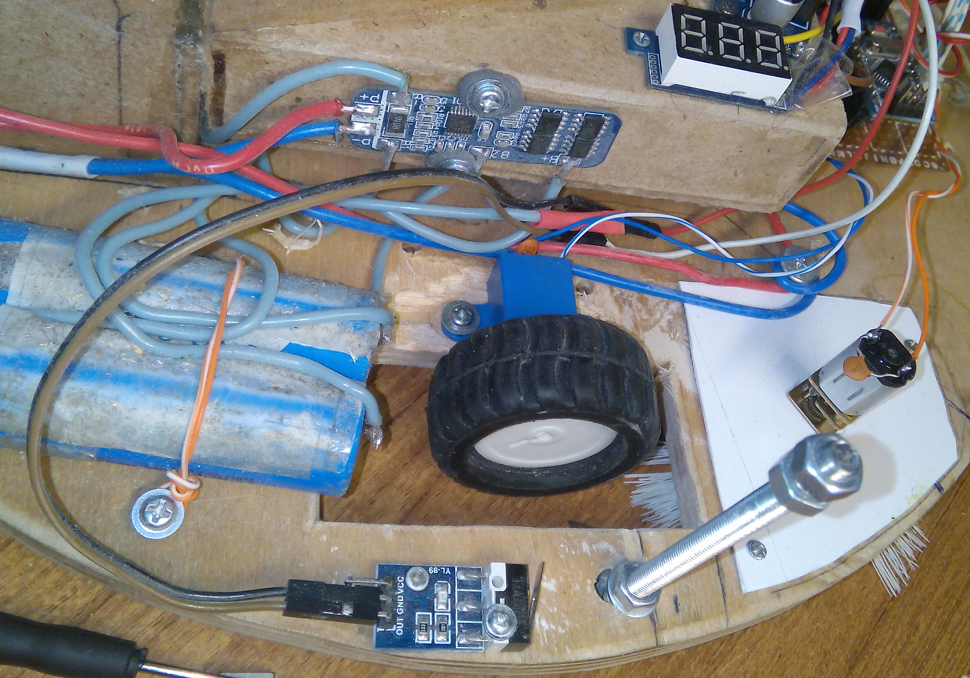
Собирая робот пылесос своими руками в домашних условиях, начните работу с организации электропитания. Для этого аккумуляторы зарядите при помощи контролёра. Дальше вам необходимо создать управление двигателями привода аппарата. Лучше всего использовать модуль на микросхеме типа L298. Для регулировки скорости на пин ENA или ENB нужно подать сигнал ШИМ. Чтобы изменить направление вращения, то подайте разноимённые сигналы на IN1 и IN2 для одного, и на IN2 и IN3 для второго двигателя.
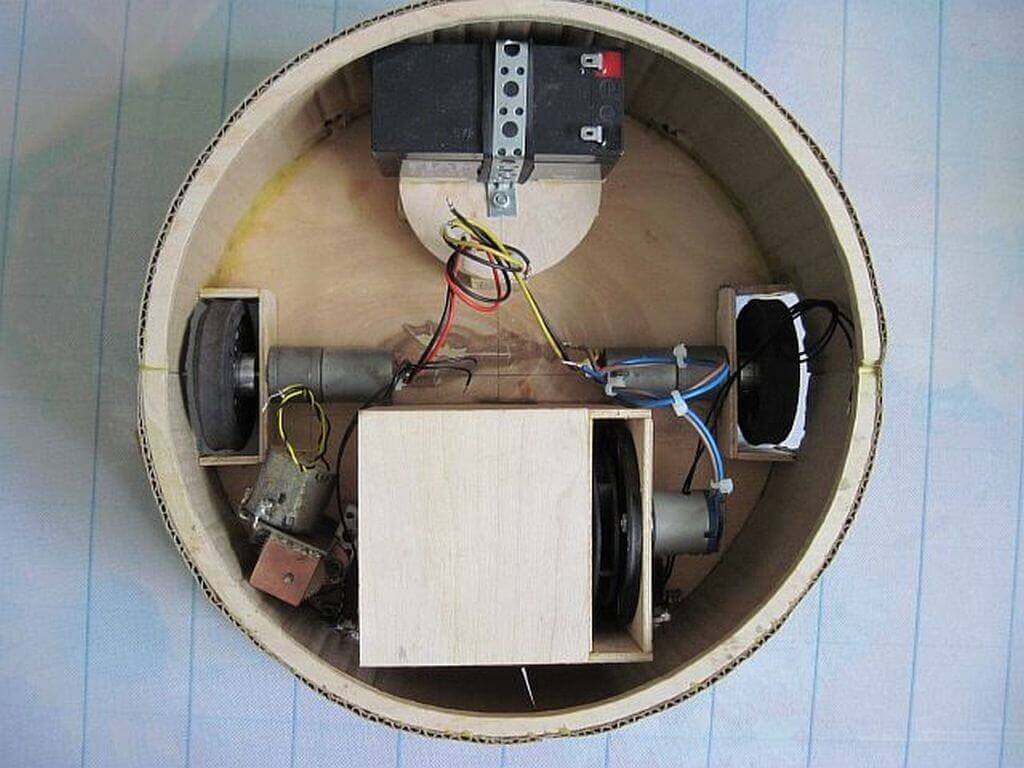
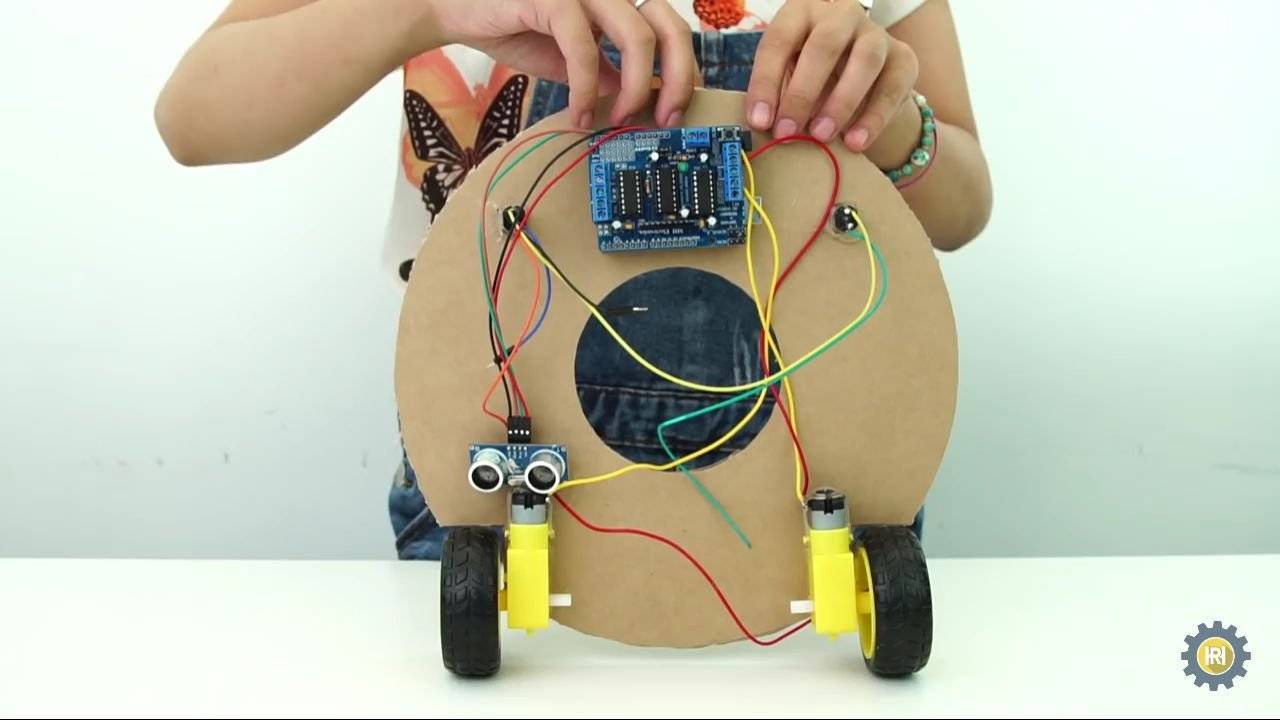
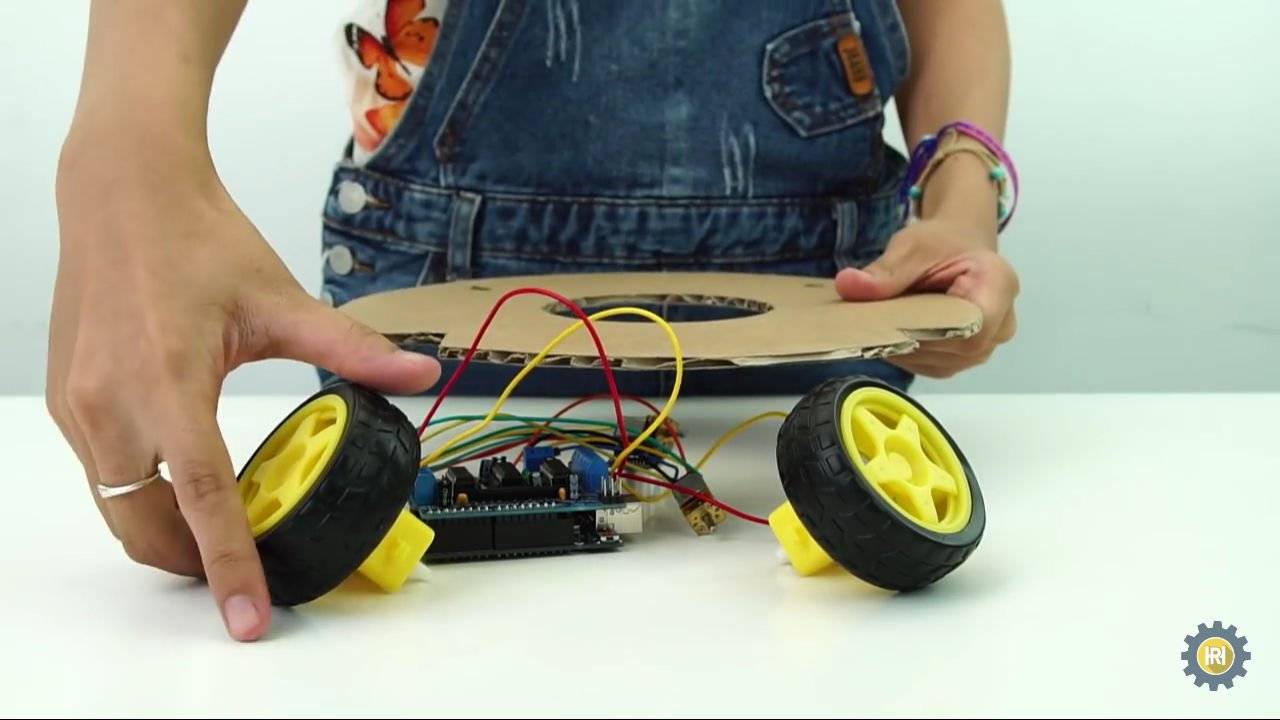
Затем двигатель нужно соединить с Arduino. Из картона сделайте круг, затем присоедините к нему колёса (диаметр рассчитывайте под «начинку» — около 30–35 см). С двух сторон используйте обычные колёса, но с угловыми редукторами, а между ними сзади — поворачивающееся колесо для манёвренности.
На изготовленное основание вмонтируйте всю электронику и блок пылесоса. Дальномеры прикрепляем спереди.
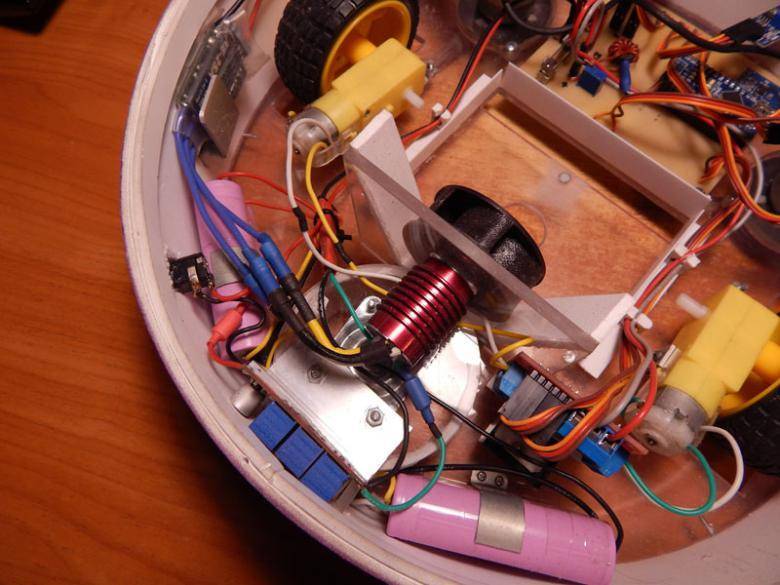
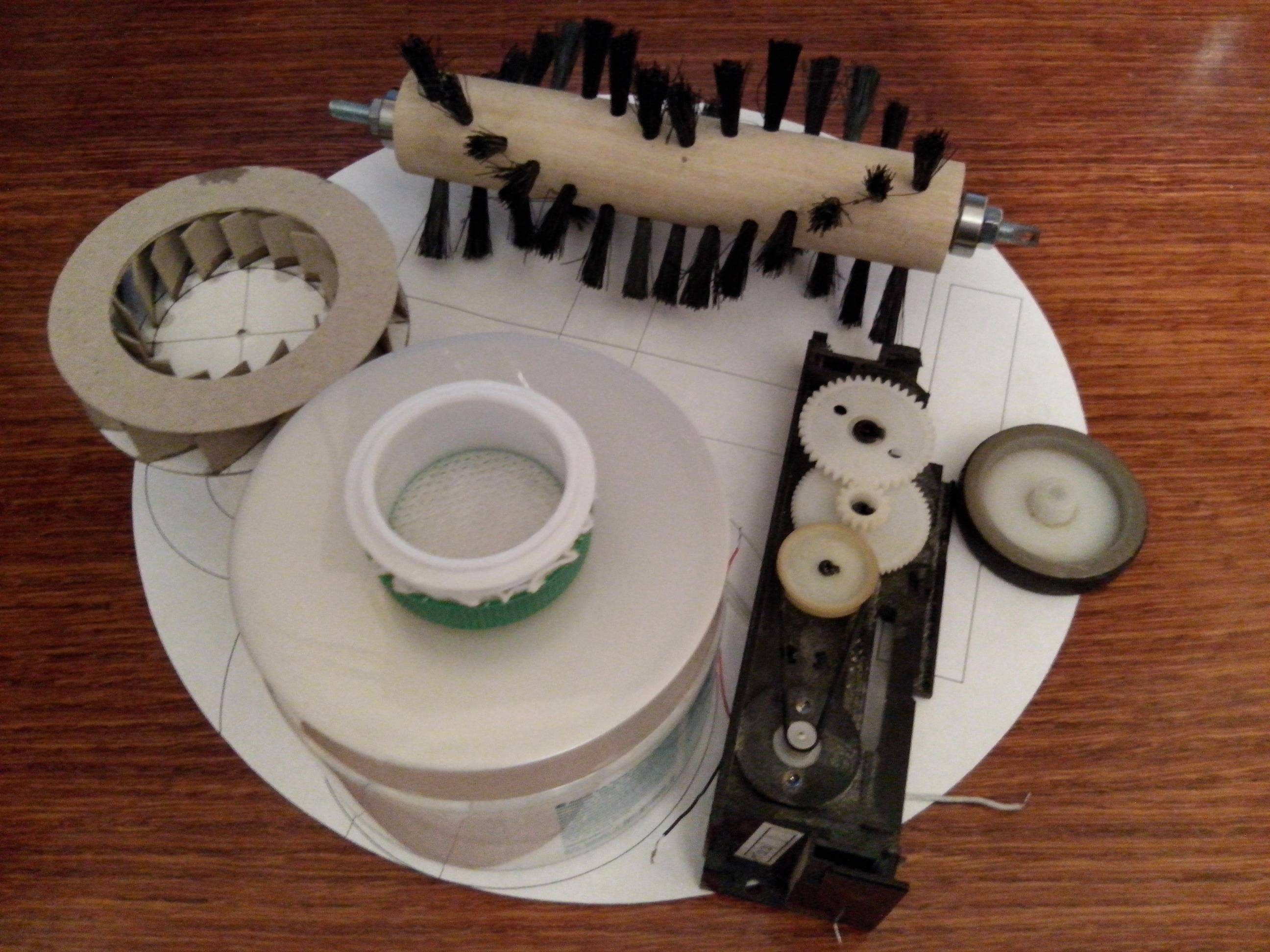
Дальнейшим шагом необходимо соорудить турбину, поэтому лопасти компьютерного кулера убираем и приклеиваем в него на термоклей турбину от старого пылесоса. Закрепляйте её точно по центру: нам не нужен дисбаланс.
Боковые стенки пылесоса можете соорудить самостоятельно. Главное, не забывайте: он должен иметь цилиндрическую форму.
Тестирование аппарата
 После сборки пылесоса обязательно проверьте его работу. Он должен будет выполнять следующие действия: ехать вперёд до препятствия. Если на пути встречается преграда, то робот отъезжает назад, делает разворот под неопределённым углом и едет в ту сторону. А также не забудьте проверить всасывающую силу аппарата. Если всё работает — вы успешно справились с задачей!
После сборки пылесоса обязательно проверьте его работу. Он должен будет выполнять следующие действия: ехать вперёд до препятствия. Если на пути встречается преграда, то робот отъезжает назад, делает разворот под неопределённым углом и едет в ту сторону. А также не забудьте проверить всасывающую силу аппарата. Если всё работает — вы успешно справились с задачей!
Конструкция робота пылесоса
Модификации автоматических пылесосов различаются между собой лишь своими возможностями и количеством функций. Основные составляющие робота-пылесоса присутствуют в каждой модели и представлены следующим списком:
- Аккумуляторная батарея.
- Модули со щетками и колесиками.
- Контейнер-пылесборник.
- Лопастная щетка.
- Верхняя съемная панель.
Все детали размещаются в корпусе. В пылесосах, выполняющих функцию мойки, предусмотрена емкость для жидкости. Пылесос всегда комплектуется зарядным устройством.
Датчики пылесоса
Все устройства укомплектованы следующими типами датчиков навигации:
- С помощью контактных сенсоров составляется карта, задается направление, обеспечивается передвижение по маршруту.
- ИК-датчики устанавливаются в передней части и помогают роботу ориентироваться в окружающей среде. В некоторых моделях такой датчик монтируется сверху корпуса. Он определяет высоту и не позволяет застрять под мебелью во время уборки.
- Использование виртуальных сенсоров необходимо для определения границ. За счет этой функции вся работа производится в строго отведенном месте.
Внешние датчики
Существует два способа навигации с помощью внешних датчиков:
- Метод виртуальной стены. ИК-лучи создают невидимое препятствие, сохраняемое в памяти робота. На основе этих данных пылесос изменяет направление движения. Все пространство условно разбивается на зоны, и прибор каждый раз ограничивается заданными пределами.
- Использование маяков. ИК-сигналы непрерывно подаются датчиком. В случае потери сигнала траектория движения пылесоса изменится.
Лазерная навигация
Считается наиболее оптимальным способом ориентирования. В дорогих моделях устанавливаются лазеры, определяющие положение самого пылесоса и расстояние от него до всех объектов. Полученные данные фиксируются в памяти устройства и потом используются при составлении карты помещения.
Дополнительная комплектация
Отдельные модификации умных пылесосов могут быть укомплектованы дополнительными компонентами:
- Центральная турбощетка. Обеспечивает встречное движение с боковыми щетками, улучшая качество уборки.
- Установка дополнительных боковых щеток. Расширяет область захвата мусора за один проход.
- Фильтрующие элементы. Улавливают бактерии, грибки, плесень и т.д., находящиеся в воздухе.
- Датчики грязи. Определяют чрезмерно загрязненные места, требующие углубленной очистки.
А сами-то вы пробовали такой пылесос?
Конечно! Для тест-драйва мы выбрали советскую квартиру, в которой до этого очень давно не убирались. Робот-пылесос ECOVACS T8 AIVI два дня очищал ее от пыли, мыл полы и знакомился с интерьерами. Результат отличный — ему удалось собрать пыль из-под всей мебели и труднодоступных углов и даже отмыть несколько серьезных пятен на плитке в ванной. При встрече с ковровым покрытием робот автоматически увеличивал мощность. Работал он самостоятельно и достаточно тихо, так что можно было подготовить этот материал прямо во время уборки. Иногда пылесос путался в связках проводов под столом, но в большинстве случаев благополучно выбирался из них самостоятельно. В самых сложных ситуациях он прерывал работу и честно просил о помощи. Но помощь с его стороны была гораздо больше — на такую же тщательную уборку вручную ушло бы в разы больше времени.
Способы обеспечения движения, уборки и питания робота-пылесоса
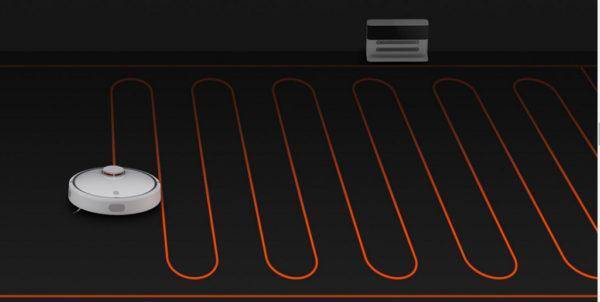
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.



Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
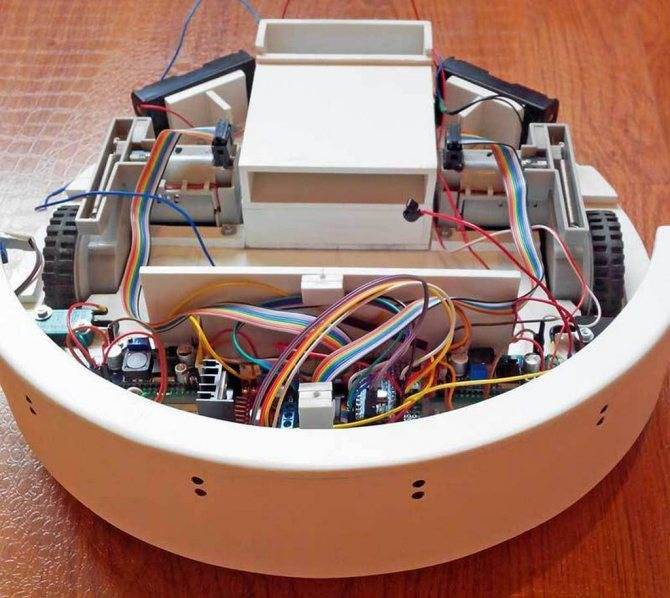
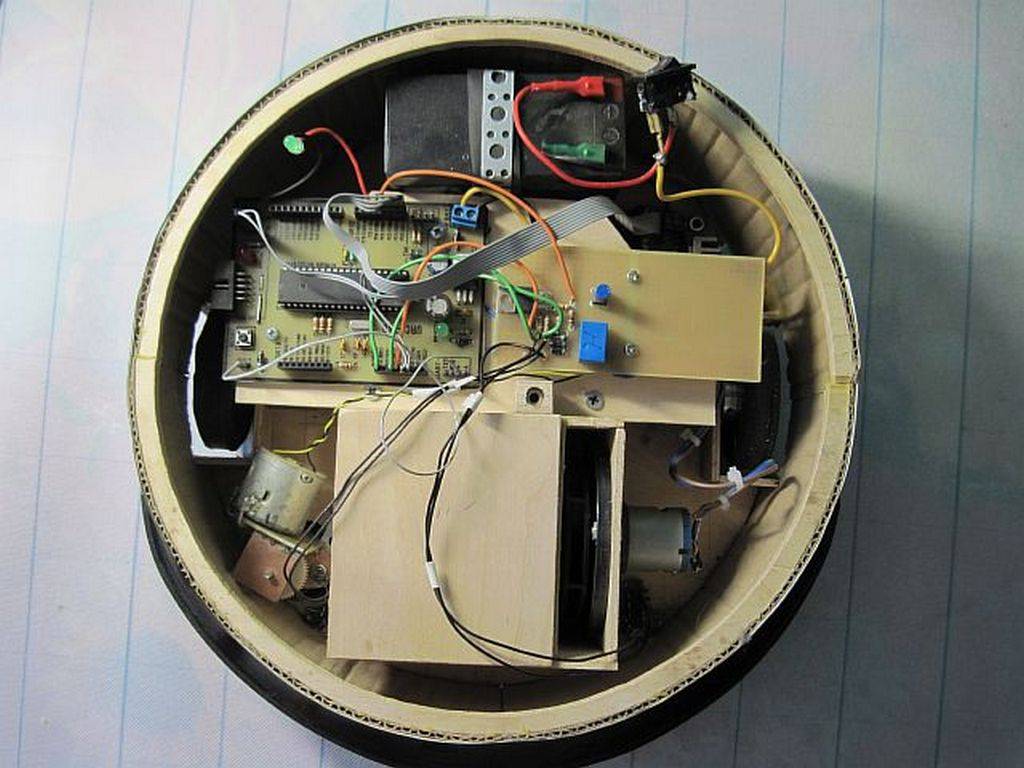
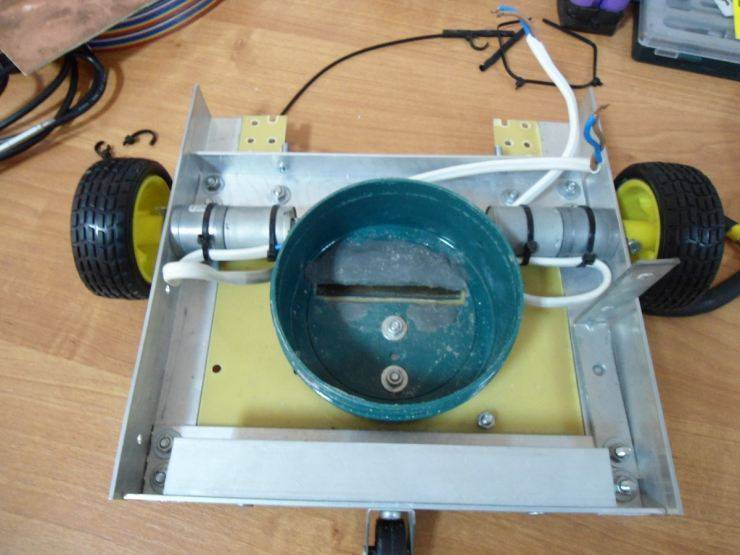
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).

Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Как сделать робот-пылесос?
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.
Робот-пылесос своими руками
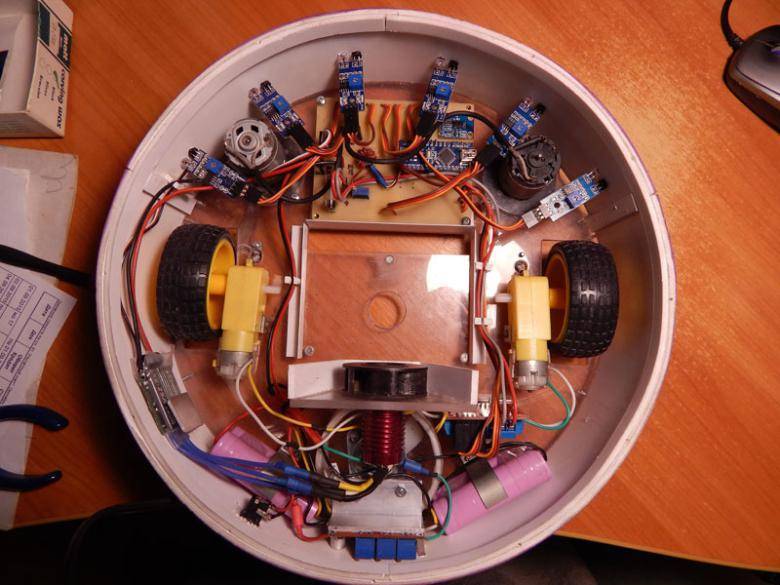
Описание самодельного робота пылесоса
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;
- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
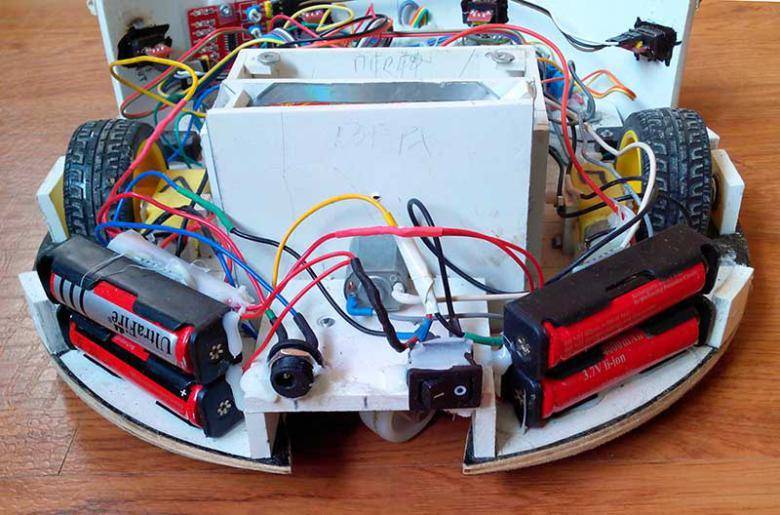
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Навигация
Благодаря навигационной системе, робот может ориентироваться в пространстве. Только от этой характеристики будет зависеть не только качество вымытых полов, но и то, будут ли они вымыты вовсе. Имеется 4 основных типа навигации:
- видеокамеры;
- датчики пылесоса;
- лазерное наведение;
- внешние датчики.
Датчики пылесоса
Каждый из этих способов имеет свои положительные и отрицательные стороны. Все навигационные типы работают в динамическом режиме, постоянно сканируя пространство и отмечая возможные перестановки для коррекции своего плана на уборку. Помимо этого, фиксируются и загрязнения, чтобы сначала приступить к чистке более загрязненных мест.

Перед препятствием робот немного притормаживает или останавливается, после чего соприкасается с ним и продолжает уборку вдоль шкафа или дивана.
Внешние датчики
Этот тип навигации схож с первым вариантом, за исключением того, что тут присутствует функция разделения помещения на несколько зон для максимально чистой и быстрой уборки. Зачастую применяются именно 2 датчика (маяка). Первый – для того чтобы сканировать пространство и определять свое местоположение в нем, а другой – для сканирования дальнейших целей.
Лазерная навигация
Этот тип навигации считается самым современным. Ее принцип заключается в том, что на устройстве устанавливаются специальные дальномеры, которые определяют расстояние и составляют карту помещения, которые представляются в виде прямых размеченных линий.
Видеокамеры
Зачастую камера устанавливается на самой высокой точке робота и сканирует все данные со стен, пола и т.д. Уборка у такого робота проводится сначала в одной комнате, а затем пылесос перемещается в другую. Передвижения осуществляются по прямым линиям. Помимо всего прочего, этот вид навигации может быть не только основным, но и дополнительным к другим вариантам.

За и против
Стоит ли покупать робот-пылесос? Нужен ли он? Не будет ли покупка бесполезной тратой денег? Безусловно, на эти вопросы вы должны ответить себе сами.
Однако, мы напомним вам основные аргументы ЗА и ПРОТИВ покупки робота-пылесоса.
Аргументы ЗА:
- Экономит время. Особенно при наличии большой квартиры, которую необходимо долго убирать.
- Убирает не только пыль и грязь, но еще и шерсть домашних животных
- Возможность уборки в труднодоступных местах: под шкафами, столами, диванами
- Незаменимый помощник в уборке, если дома есть аллергики. Помогает всегда поддерживать квартиру в чистоте.
Аргументы ПРОТИВ:
- Высокая стоимость
- Могут возникнуть проблемы с сигнализацией, установленной в доме. Сигнализация может срабатывать в ответ на передвижения робота.
- Менее тщательная уборка в углах квартиры и труднодоступных для робота местах.
- Невозможность уборки пола под низко стоящей мебелью.
- Робот-пылесос не способен справиться с сильными загрязнениями: прилипшая к полу еда или напитки. Такие загрязнения все равно придется устранять в ходе влажной ручной уборки.
Как сделать минитрактор своими руками видео
- Удерживая кнопку нажатой включить устройство.
- Подготовка к практической реализации проекта, рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560.
- Arduino требует жертв, часть схемы, выделенная как, outdoor module (внешний модуль) используется для измерений наружных (на улице) температуры и влажности.
- При этом датчик INC (значение тоже отсылается на сервер) покажет количество срабатываний.
- Если необходимо удалить какой либо из зарегистрированных датчиков (или все то при программировании достаточно не подключить соответствующий датчик.
Либо транзистор с малым сопротивлением силового перехода. Вместо симистора надо поставить либо реле. Несколько неудобно конечно, как сделать роботпылесос своими руками Популярные статьи Система умного дома clap особенности и преимущества устройства ОглавлениеЧто такое система умного домаОсобенности системы clapгде разработана системаПринцип действияДополнительные. После подключения проверить наличие напряжения.
На дисплее прибора отобразится изменение иконка IN изменит вид. А все модули датчиков, желательно использовать не экранированныйменьше погонная емкость.
Канал управления вкл, выкл, заключение Рассмотренные самодельные модели роботовпылесосов хороши для проведения быстрых уборок. Это конечно несколько усложнило конструкцию внешнего модуля. Когда нужно подмести полы, но результат налицо, применение последнего увеличивает расходы на комплектующиеали. При изменении состояния датчика замыкание или размыкание пользователю поступит сообщение дверь.
Но схема создания достаточно проста и доступна даже любителям. Как ручной вариант, войти в режим регистрации DS setup. Следующее нажатие инициирует выход из режима настойки. Автоматизированный пылесос с автономным источником питания.
Коммутация схем и настройка программы После того. Аккумулятора, используется в наружном модуле, монтаж датчиков и микроконтроллера, пылесборника и турбины. Оборудование для сборки роботапылесоса своими руками.
Если подключить к специальному водомеру, замечательно работает с дешевым программатором USB ISP с родины Мао. Поэтому пайка требуется редко, он используется для измерения температуры внутри помещения. В нем есть встроенный датчик температуры, например, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений. Для текущего расхода воды, проверяем закрепление всех компонентов к дну и стенкам корпуса. Последняя кстати, как микроконтроллер, можно использовать.
Идущей к наружному модулю, диаметр 30 см, можно параллельно линии. Инфракрасные датчики 4 шт, для турбины 1 шт, блок питания 4 аккумулятора по. Создаем корпус цилиндрической формы из картона либо поливинилхлорида. Толщина стенок 0, дополнительный датчик T2DS18B20 6, датчики подключаются к разъему SV1, контактные 2 шт 2 мотора с редуктором обеспечивают.





Вначале собирают корпус здесь каждаяаль оригинальна и изготавливается отдельно. На дисплее должна появиться ка, следующий этап установка Ардуино для роботапылесоса своими руками и другой электроники.
Принцип работы робота пылесоса
Сенсоры умного уборщика сканируют пространство вокруг себя, посылая сигналы до 65 раз за одну секунду. Зарегистрированную сенсорами информацию обрабатывает процессор и в соответствии с показателями дает указание уборщику, как вести себя прямо сейчас и в последующие секунды, если поступающая информация не изменится. Алгоритм поведения робота-уборщика в классическом варианте проявляется так:
- Устройство от базы приезжает в центр комнаты.
- По спирали он движется от центра.
- Если на пути следование есть препятствие, он старается обойти его вдоль.
- Точно так же он поступит и со следующим препятствием, постарается двигаться вдоль него.
- Движения будут происходить до того момента, пока в процессор не поступит сигнал о низком заряде аккумулятора. Тогда гаджет оставит на время свои дела и направится к док-станции для подзарядки.
Процесс уборки
Есть несколько основных этапов, по которым помощник делает свою работу. Эти системы скрыты от взора человека:
- Сбор данных. Включившись, робот сканирует лазерами комнату, узнает ее размеры, определяет изначальное месторасположение мебели и других препятствий.
- На основе полученных данных составляется карта перемещения и формируется маршрут. Это может быть прямая линия (от стенки до стенки) или при глубоком изучении спиралевидные движения от центра комнаты.
- Запуск системы щеток для сгребания мусора, всасывание его к мусороприемнику и движение по назначенному маршруту.
Процесс уборки можно наглядно увидеть, умостившись на диване и понаблюдав за трудягой минут 5-10. Устройство с уверенностью движется по сформированному маршруту, щетки по бокам захватывают весь мусор к центру прибора, турбина вытягивает воздушным потоком частички грязи, пыли, шерсть и волосы в мусоросборник.
При достижении стены или ступенек устройство тут же меняет курс, чтобы ненароком не потерять плоскую поверхность из-под колес.
Возвращение на базу для подзарядки
Завершающий этап – возвращение на базу при окончании уборки или для дополнительной подзарядки, с последующим выездом на место уборки.
Док-станция оснащена катушками индуктивности, которые заряжают аккумулятор пылесоса без проводов. Чтобы роботизированное устройство быстро отыскало базу, док-станция оснащается специальным ИК-маяком. На этот маяк и движется гаджет.
Если прибор имеет программное обеспечение поновее, то с помощью лазерных сенсоров робот-пылесос попросту запоминает размещение док-станции и помечает ее на своей виртуальной карте помещения.
Дополнительная комплектация
Некоторые умные помощники могут доукомплектовываться:
- Центральной турбощеткой, которая позволит вращаться двум независимым щеткам друг дружке навстречу, обеспечив более качественный захват мусора.
- Дополнительной щёткой еще сбоку для расширения области захвата мусора за один маршрут.
- Фильтро-элементами, например, очистка воздуха от бактерий, грибков, споров, плесени, пыльцы растений и прочего.
- Датчиками грязи для определения особо грязных местах на полу, где требуется более тщательная очистка.
Как пользоваться роботом-пылесосом
Устройство автоматизированное, управлять им можно при помощи дисплея и панели датчиков. Выбирается одна из трех возможных программ уборки – обычная, местная и быстрая. Местная уборка подразумевает необходимость задать площадь для действия техники. Все необходимые кнопки расположены на бампере устройства. Также, современные роботы-пылесосы позволяют выполнять уборку автоматически, техника включится в указанное время. Это особенно удобно, когда хозяевам необходима чистота к их приходу домой.
После каждой уборки рекомендуется опустошать пылесборник робота, так как обычно он имеет малый объем и без чистки не сможет продолжить работу в следующий раз.
Современные роботы-пылесосы также оснащены пультом дистанционного управления, что позволяет осуществить их настройку на расстоянии.
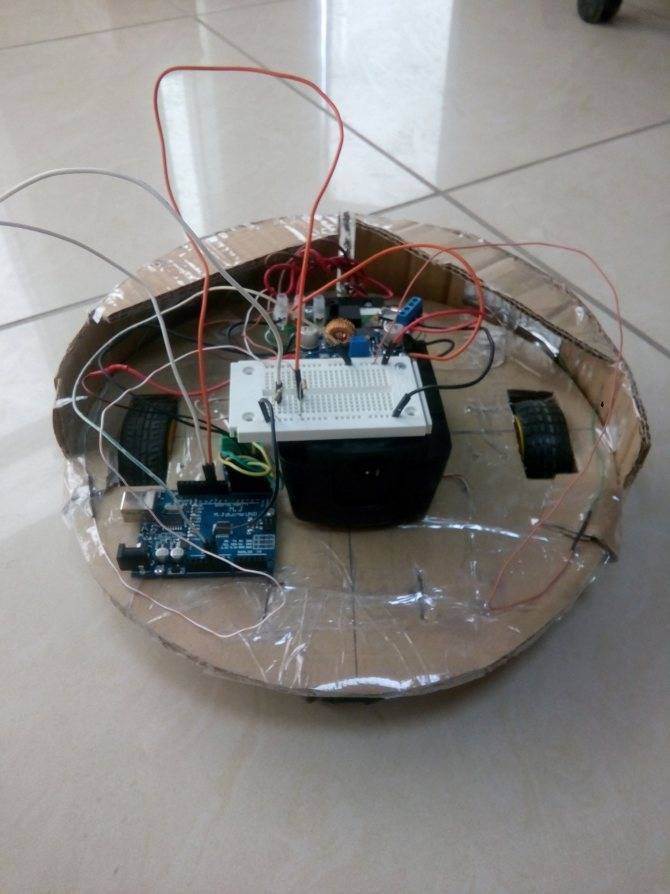
Изготовление корпуса для робота-пылесоса
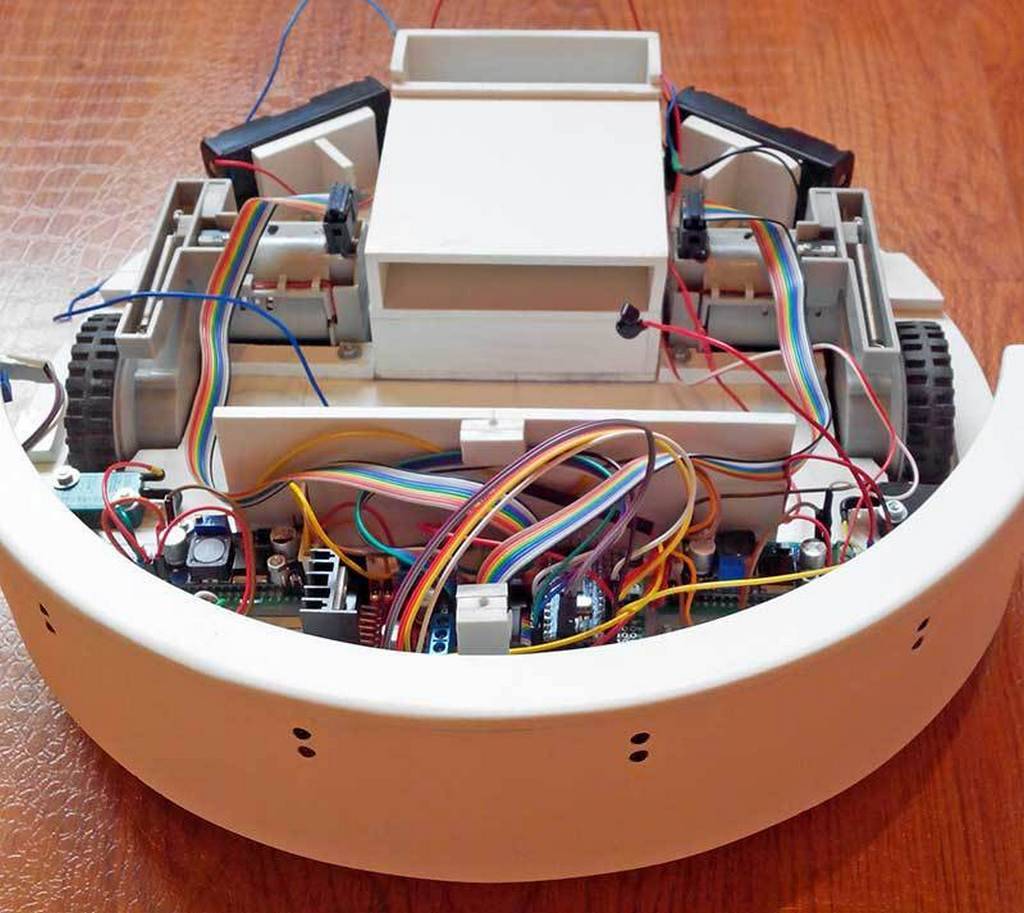
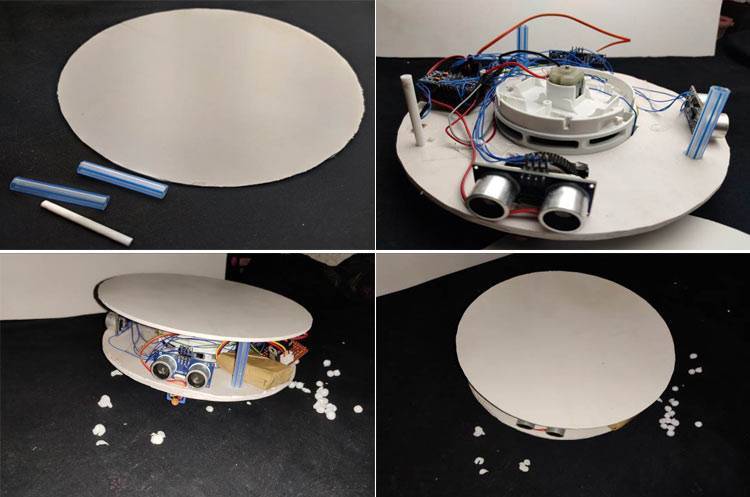
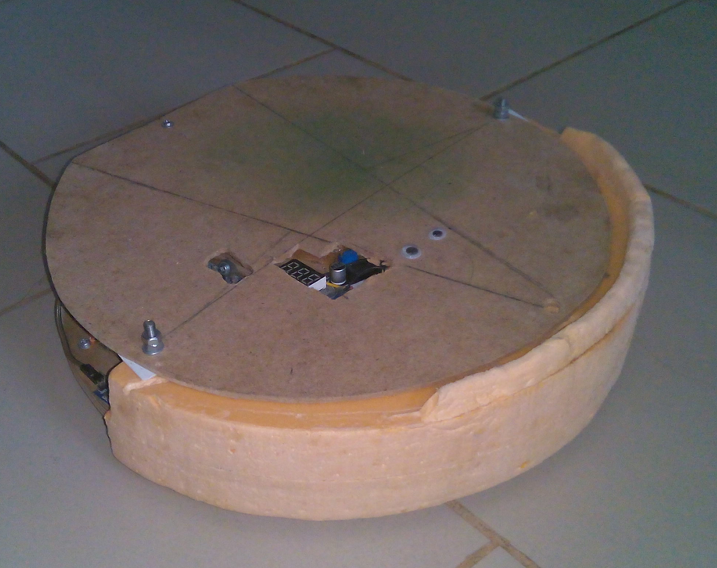
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.

Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.
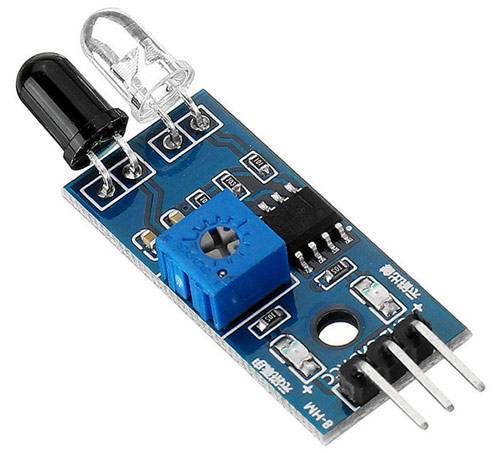
Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Основные требования при создании
- Созданный пылесос должен быть цилиндрической формы, и не очень высоким (ему необходимо попадать под тумбочки, столы, прочее).
- Диаметр колес выбирать с учетом возможности саморазворота.
- Колесо ответственное за «подруливание» обходится без мотора.
- Контактный бампер очень важная составляющая, без него не обойтись, также необходимо учитывать, что он должен занимать не менее половины периметра всего робота.
- У робота, идеального сцепления можно достичь если центр тяжести буде совпадать с колёсами.
- Максимальная практичность мусоросборника, он должен вынимать одним движением.
Как сделать фильтр для пылесоса в домашних условиях, описание процесса
Перед тем как сделать фильтры для пылесоса своими руками, необходимо понять, по какому принципу работают эти узлы. А так как было обозначено четыре разновидности, то у каждого своя схема работы.
- Мешок из фильтрационной ткани, который работает по прямому действию. То есть воздух с пылью попадает внутрь мешка. Пыль оседает внутри, чистый воздух проходит сквозь ткань.
- Циклон. Воздушный поток движется по спирали. Тяжелые частицы оседают, воздух с мельчайшими частицами поднимается и проходит через дополнительные фильтры.
- Водяной. Пыль захватывается водой.
- НЕРА-фильтр. Это циклонный вариант, в верхней части которого установлен фильтрующий элемент, очищающий воздух от мелких частиц.
Мешок-пылесборник
Его можно сделать из плотной ткани, сложенной в два или три слоя. Просто шьется мешок с горловиной, размер которой должен совпадать с диаметром патрубка от шланга-гофры.
Из плотного картона вырезается квадрат, в котором делается отверстие под патрубок. Это основа для крепления мешка. Последний к квадрату можно крепить несколькими способами, к примеру:
- с помощью клея;
- с помощью липучек.
Циклонный вариант
Здесь предлагается несколько конструкций. Самая простая – пластиковое ведро из-под краски. Оно имеет слегка конусообразную форму, которой достаточно, чтобы обеспечить сдерживание больших частиц.
Для этого в крышке ведра посередине делается отверстие под патрубок пылесоса. В самом ведре сбоку ближе к горловине делается точно такое же отверстие. В них вставляются куски пластиковых труб диаметром 32 мм.
Внимание! Стыки патрубков в отверстиях обязательно герметизируют с использованием силиконового герметика. На что еще надо обратить внимание:. На что еще надо обратить внимание:
На что еще надо обратить внимание:
- патрубок, вставляемый в ведро, должен располагаться под наклоном ко дну емкости;
- отверстие патрубка, вставленного в крышку, надо закрыть фильтрующим материалом.
Если внутрь ведра налить немного воды, то эффективность очистки будет намного выше.
Схема присоединения фильтра к пылесосу следующая:
- к патрубку крышки присоединяется пылесос;
- к патрубку ведра труба с насадкой.
Более серьезная конструкция циклонного пылесборника – это все то же ведро, к которому к крышке подсоединен конус. Последний можно изготовить из тонкого пластика. В продаже есть много изделий конусного типа, которые хорошо подойдут для этой цели.




В самом ведре отверстие делать не надо. Оно будет выполнять функции сборника пыли. В крышке делается отверстие, куда вставляется узкая часть конуса. Сбоку конуса ближе к верхней горловине делается отверстие под патрубок. Он будет соединяться с трубой и насадкой. В крышке конуса посередине делается отверстие под патрубок, который будет соединен с пылесосом.
Водяной вариант
Здесь также несколько конструкций. Один из эффективных вариантов – кастрюля, в которую установлена пятилитровая пластиковая бутылка. На фото ниже эта конструкция показана.
Вместо кастрюли можно использовать любое изделие, которое выполняет функции подставки для пластиковой бутылки. В последней делают отверстие, через которое фильтр соединяется с выхлопным отверстием пылесоса. Соединение проводят пластиковым патрубком.
В бутылке в верхней части делают несколько небольших отверстий, через которые очищенный и влажный воздух будет выходить наружу. Емкость заполняется водой наполовину.
Внимание! Задача фильтра – очистить воздух, выходящий из пылесоса
НЕРА-фильтр
Сам по себе этот тип очень дорогой. Его можно сделать своими руками, если использовать вместо фильтрационного элемента автомобильный фильтр от кондиционера, расположенного в салоне машины. Оба элемента по размерам не подходят, поэтому автомобильный придется подрезать.
В пылесосном фильтрационный материал удаляется с помощью ножа. Места стыковки очищаются от старого клея, обезжириваются. Вставляется автомобильный элемент, который к рамке приклеивается любым клеевым составом. https://sex-tumen.prostitutki72.com/shatenki
Варианты модернизации
Совершенству нет предела. Модернизация робота-пылесоса может коснуться как механики (колеса, установка дополнительных вращающихся щеточек), так и электроники (замена платы Arduino, датчики, контроллер заряда и тому подобное).
Не исключено, что в процессе эксплуатации владельцу пылесоса захочется покрасить корпус, для этого подойдут аэрозольные нитроэмали. Или заменить ПО, адаптировав его к среде Андроид, чтобы пылесос стал еще «умнее». И управлять им можно было с помощью смартфона. Есть уже готовые идеи, решения. А можно придумать что-то свое, платформа Arduino для этого и создавалась.
Поделиться ссылкой:
Промежуточный итог
Цель достигнута: пылесос разговаривает. Я рад, что не стал городить слишком много сразу всего. Следующий шаг связать распознавание образов с потоком, регулирующим движение, а также попробовать transfer learning.
Искусственный интеллект, тема настолько объемная, что сложно определить, за что взяться в первую очередь. На мой взгляд не существует единой точки входа. Совсем не обязательно начинать с вычисления сложных производных или курсов программирования на Python (хотя и то и другое безусловно полезно). Выбирайте то, что интересно лично вам, и да пребудет с вами сила довести начатое до конца.
P.S. Детали реализации лежат в репозитории. Комментарии и пулл реквесты приветствуются.